
专利号:2022105336263
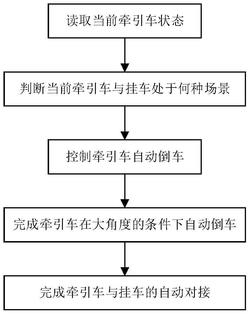
一种控制电动牵引车与挂车实现大角度对接的方法及系统,涉及牵引车与挂车自动对接技术领域,用以解决现有的牵引车与挂车自动对接方法需要的硬件成本高或对接准确度不高的问题。本发明的技术要点包括:利用牵引车与挂车当前位姿状态,判断牵引车和挂车相对位置,计算当前时刻阿克曼转角,生成牵引车线控转向机构指令,改变前轮转角,使牵引车纵向轴线逐渐逼近挂车纵向轴线,直至牵引车与挂车纵向轴线重合,以实现在大角度条件下基于阿克曼转角控制牵引车与挂车的自动对接。本发明适用于电动牵引车在大角度的条件下与挂车进行自动对接。
