
专利号:2020112839624
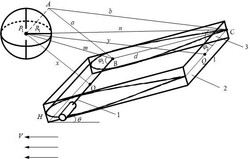
本发明涉及一种船用减摇鳍的鳍体实时自动避障方法,该方法将减摇鳍的鳍体等效成长方体模型,其中障碍物的等效球模型是将障碍物看成一个质点,质点与鳍体的安全距离作为半径,标记处于鳍体中的轴中心点、长方体模型右侧面中心点与这两点在后侧面所在平面的投影点,通过测距传感器分别测出障碍物与其余四点的距离,再测出两个中心点的距离和长方体模型的宽,若障碍物将与鳍发生碰撞,则需要在降低一定减摇效果的情况下改变鳍摆角实现避障,由折算关系可知所需改变的角度。本发明优点是方法简单、操作方便、实用性强,并且避免了鳍在遇到暗礁、较大悬浮物或特殊情况时发生碰撞的不利情况,解决了传统减摇鳍的鳍体缺乏实时自动避障的问题。
