
专利号:2022105438017
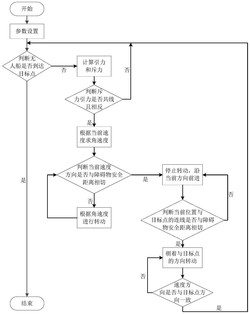
本发明针对人工势场法(artificial potential field approach,APFA)在无人船路径规划应用存在建模理想化导致路径效率低、易陷入局部极小值的问题,公开了一种基于改进人工势场法的无人船航速自适应路径规划方法,具体包括:将障碍物规则化处理,以障碍物的最长距离为直径,等效为圆形障碍物,设置安全距离,弥补传统APFA建模理想化导致无法准确判断与障碍物距离的不足;设计适用于不同航速的无人船转角公式,构建其转角判定条件,根据两次切线判定准则,避免无人船路径规划陷入局部最优。仿真结果表明,本发明提出的改进APFA方法解决了无人船在不同航速下易陷入局部极小值的问题,所规划路径更优、时间更快、效率更高。
